
Clasificación según el número de rotores
Los drones multirrotor se clasifican según la cantidad de rotores que utilizan para generar sustentación y control. Esta clasificación es fundamental para comprender su estabilidad, capacidad de carga, eficiencia, redundancia y uso recomendado en operaciones profesionales.
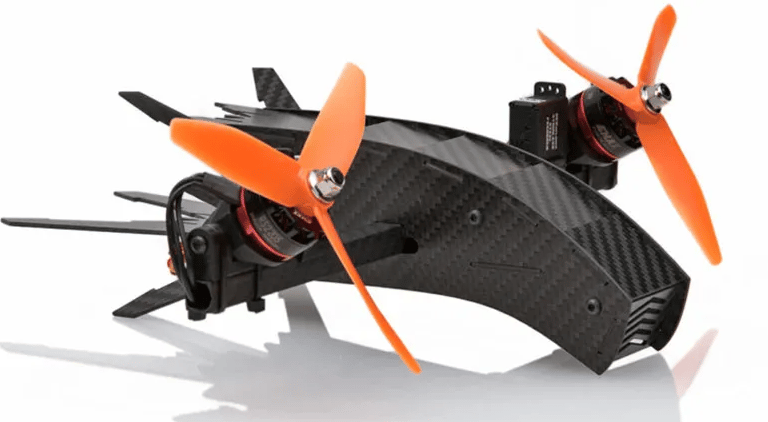
Bicóptero (2 rotores)
Los bicópteros son una configuración poco frecuente en el mercado civil y profesional, pero representan un diseño interesante desde el punto de vista mecánico y aerodinámico.
Ventajas:
• Estructura muy liviana y compacta.
• Buena eficiencia energética en vuelo hacia adelante.
• Menor resistencia aerodinámica que un multirrotor tradicional.
Limitaciones:
• Estabilidad inferior en vuelo estacionario comparado con quad/hexacópteros.
• Baja redundancia: la falla de un motor implica pérdida total de control.
• Capacidad de carga muy limitada.
• Requiere controladores avanzados para compensar la falta de rotores.
Características principales:
• Dos rotores principales montados en brazos laterales.
• Control de actitud mediante inclinación (tilt) de los motores, similar a un tilt-rotor.
• Menor complejidad estructural, pero mayor complejidad en control de vuelo.
• Inspirados en configuraciones VTOL experimentales.
Usos típicos:
• Investigación y desarrollo.
• Prototipos experimentales.
• Aplicaciones educativas.
• Proyectos de ingeniería orientados a tilt-rotor.
• Robots aéreos ligeros para pruebas de dinámica de vuelo.





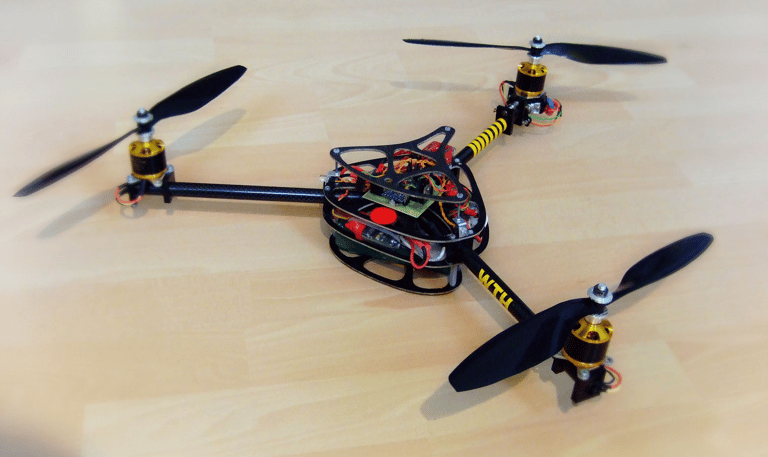
Tricóptero (3 rotores)
Los tricópteros son poco comunes en aplicaciones profesionales debido a su menor estabilidad y redundancia.
Ventajas:
• Bajo peso.
• Consumo energético reducido.
Limitaciones:
• Baja redundancia ante fallas.
• Menor estabilidad en condiciones de viento.
• No recomendado para cargas pesadas ni sensores avanzados.
Características principales:
• Tres brazos con un motor en cada uno.
• Requiere mecanismos adicionales para controlar el giro (yaw).
• Estructura liviana y maniobrable.
Usos típicos:
• Hobby.
• Prototipos experimentales.

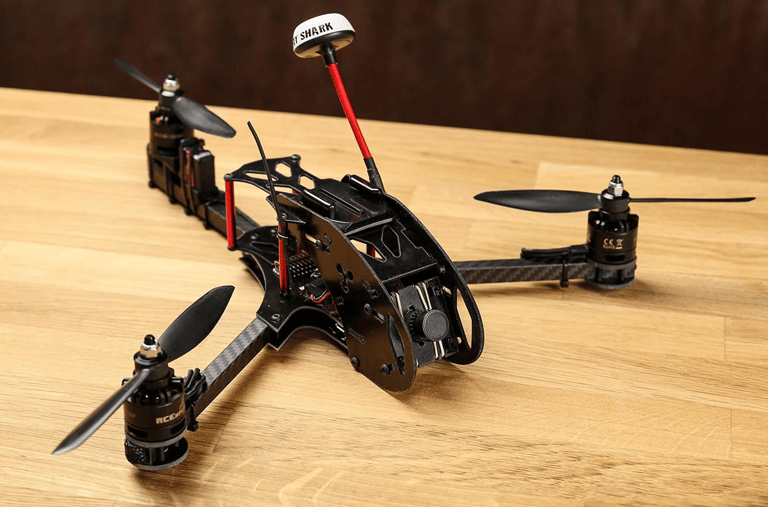





Cuadricóptero (4 rotores)
Es la configuración más extendida en drones de consumo y profesionales ligeros.
Ventajas:
• Muy estable para vuelo estacionario.
• Ideal para cámaras y sensores livianos.
• Bajo costo operativo.
Limitaciones:
• Redundancia limitada: la falla de un motor compromete el vuelo.
• Capacidad de carga moderada.
Características principales:
• Cuatro motores distribuidos en forma de “X” o “+”.
• Excelente equilibrio entre estabilidad, costo y simplicidad.
• Fácil de operar y mantener.


Usos típicos:
• Fotografía y video.
• Seguridad.
• Inspecciones básicas.
• Agricultura ligera.
• Topografía con sensores compactos.






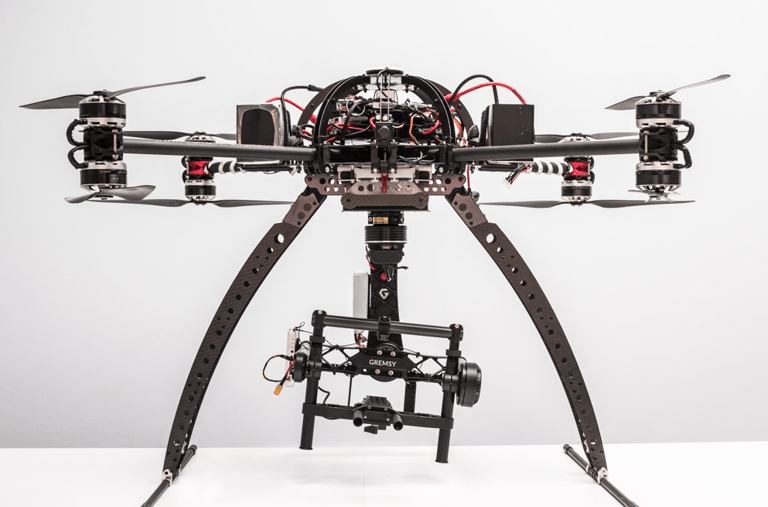
Hexacóptero (6 rotores)
Muy utilizado en aplicaciones profesionales que requieren mayor estabilidad y capacidad de carga.
Ventajas:
• Puede continuar el vuelo ante la falla de un motor.
• Capacidad de carga superior.
• Ideal para cámaras profesionales y sensores pesados.
Limitaciones:
• Mayor consumo energético.
• Costos más elevados.
Características principales:
• Seis motores distribuidos en forma simétrica.
• Mayor empuje y redundancia.
• Excelente estabilidad en viento.
Usos típicos:
• Inspección industrial.
• Fotografía y cine profesional.
• Operaciones de seguridad.
• Mapeo avanzado.
• Cargas medianas.






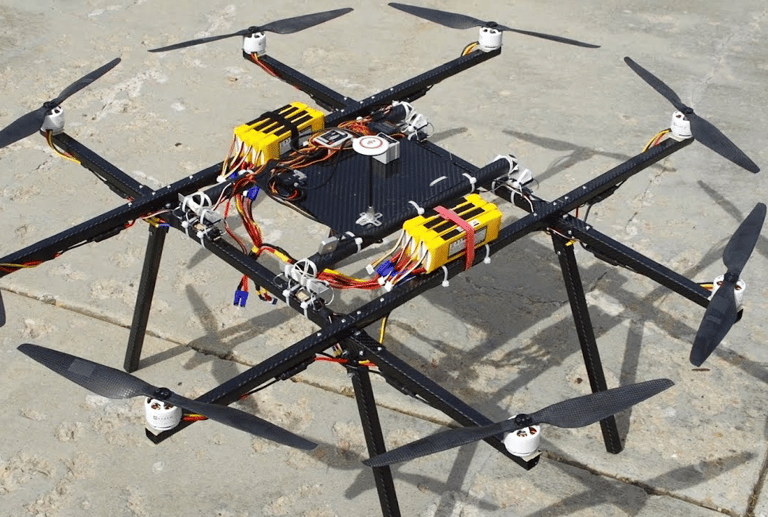
Octocóptero (8 rotores)
La configuración más robusta dentro de los multirrotores convencionales.
Ventajas:
• Puede soportar fallas múltiples sin perder control.
• Ideal para cargas pesadas (LiDAR, cámaras cinematográficas, sensores especializados).
• Excelente para misiones críticas.
Limitaciones:
• Alto consumo energético.
• Costos de operación y mantenimiento elevados.
• Tamaño y peso significativos.
Características principales:
• Ocho motores que ofrecen máxima redundancia.
• Capacidad de carga muy elevada.
• Estabilidad excepcional incluso en condiciones adversas.

Usos típicos:
• Cine y publicidad de alto nivel.
• Inspecciones complejas.
• Sensores LiDAR de gran porte.
• Operaciones críticas de seguridad y defensa.






Configuraciones Especiales (X8, Y6, coaxiales)
Muy utilizado en aplicaciones profesionales que requieren mayor estabilidad y capacidad de carga.
Y6 (hexacóptero coaxial en 3 brazos)
• Seis motores en tres brazos
• Buena redundancia con estructura compacta
Usos típicos:
• Operaciones tácticas
• Inspecciones en espacios reducidos
• Cargas medianas con alta estabilidad
X8 (octocóptero coaxial en 4 brazos)
• Ocho motores en cuatro brazos
• Excelente para cargas pesadas en un tamaño reducido





SUMA DRONES ARGENTINA
Drones para cada terreno. Soluciones para cada industria.
¡SUSCRÍBETE!
10 a 18 horas (AR)
Lunes a Viernes
© 2026. Todos los derechos reservados.
SOBRE NOSOTROS
Premios y reconocimientos
Historia de la marca
ASOCIACIONES
COOPERACIÓN
Tienda en línea
Tienda física
TÉRMINOS Y CONDICIONES